
Posted inMechanical
Mechanical & Wheels – Hands On Ground Robot Design
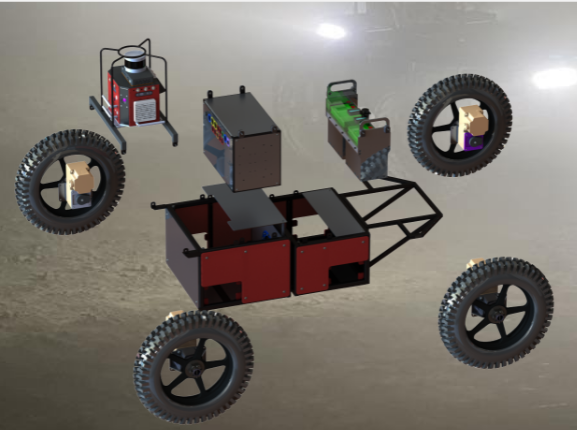
This post is part of the Hands on Ground Robot Design series. See here for the full list of posts/topics http://robotsforroboticists.com/hands-on-ground-robot--drone-design-series for information on mechanical, electrical, motion control, computing, sensors, and more. Robot Size Decision After we have the list of system requirements we start with the design of the mechanical structure of the robot. In this case we decided…

